Two-View Stereo Matching
约 85 个字
Two-View Stereo Matching¶
- Task: Construct a dense 3D model from 2 images of a static scene
Pipeline:
- Calibrate cameras intrinsically and extrinsically (Lecture 3.1)
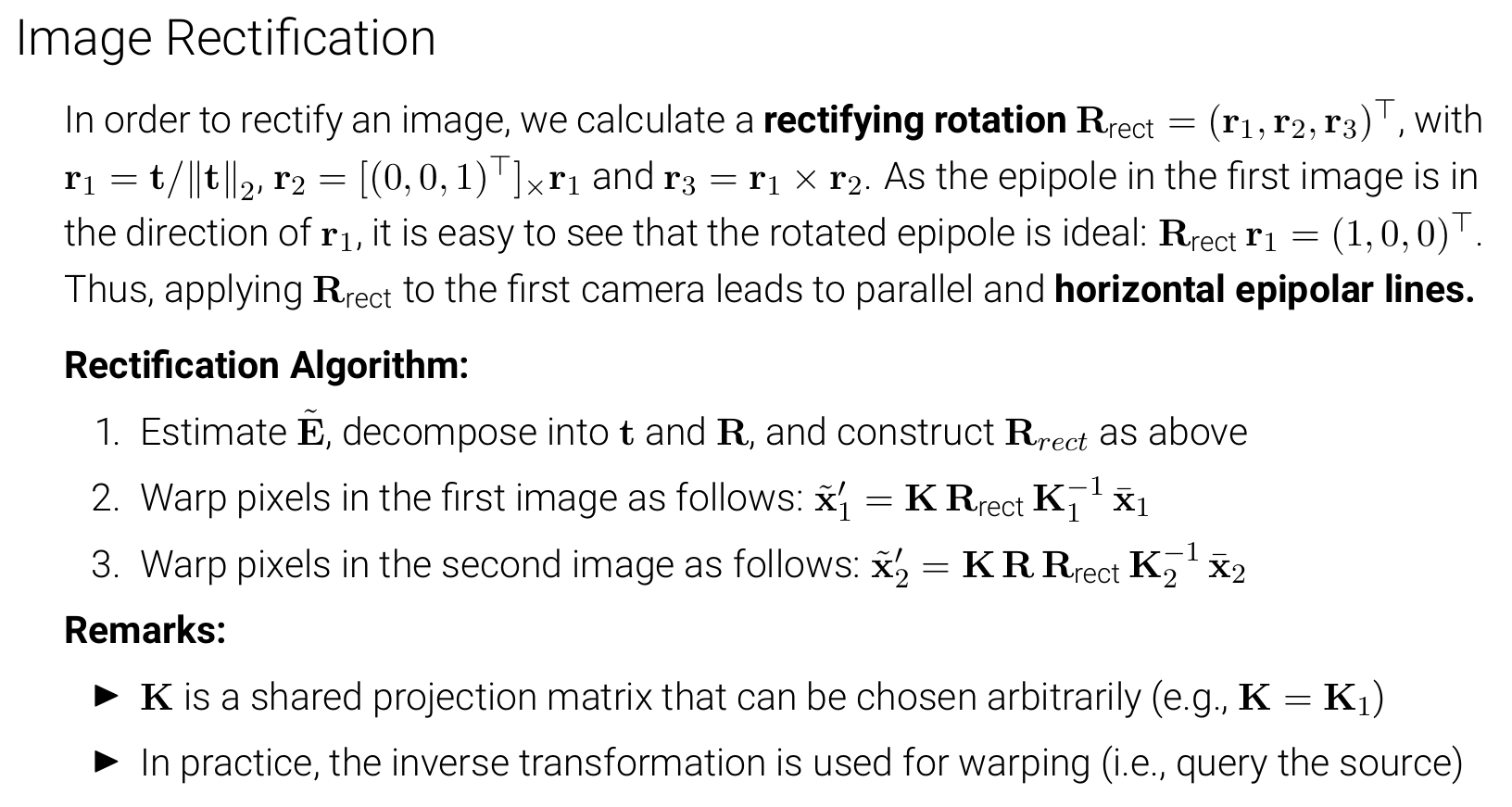
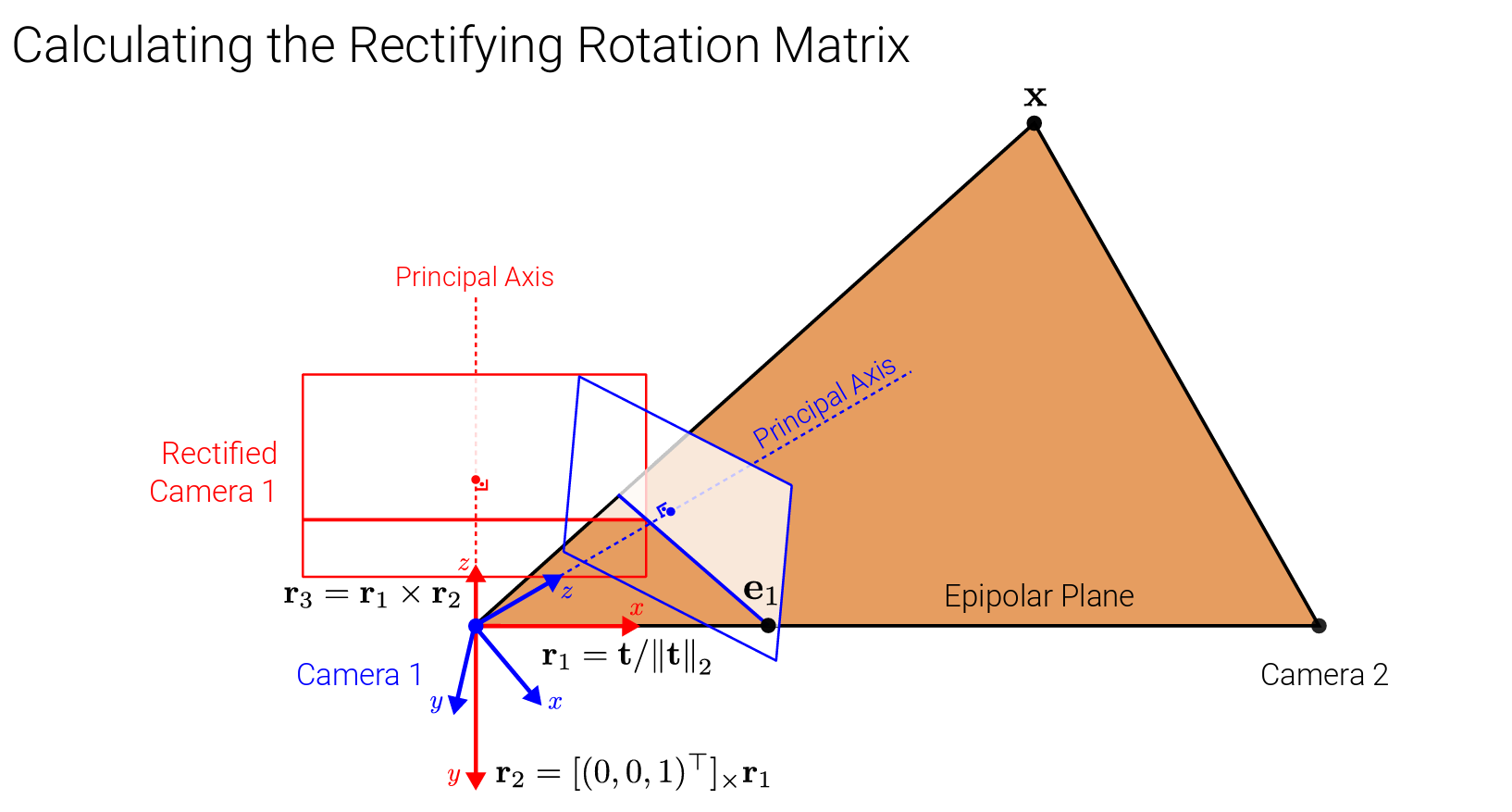
- Rectify images given the calibration
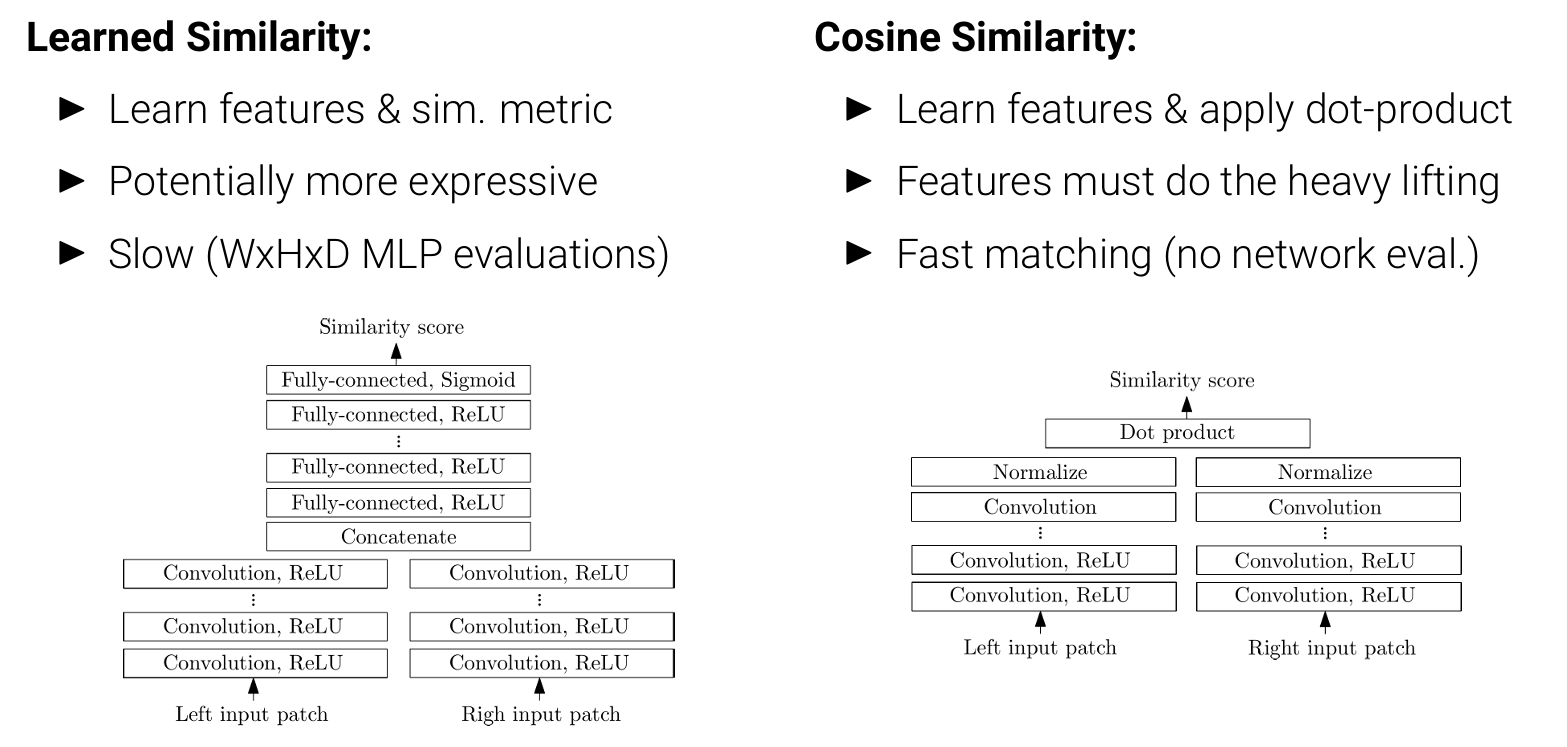
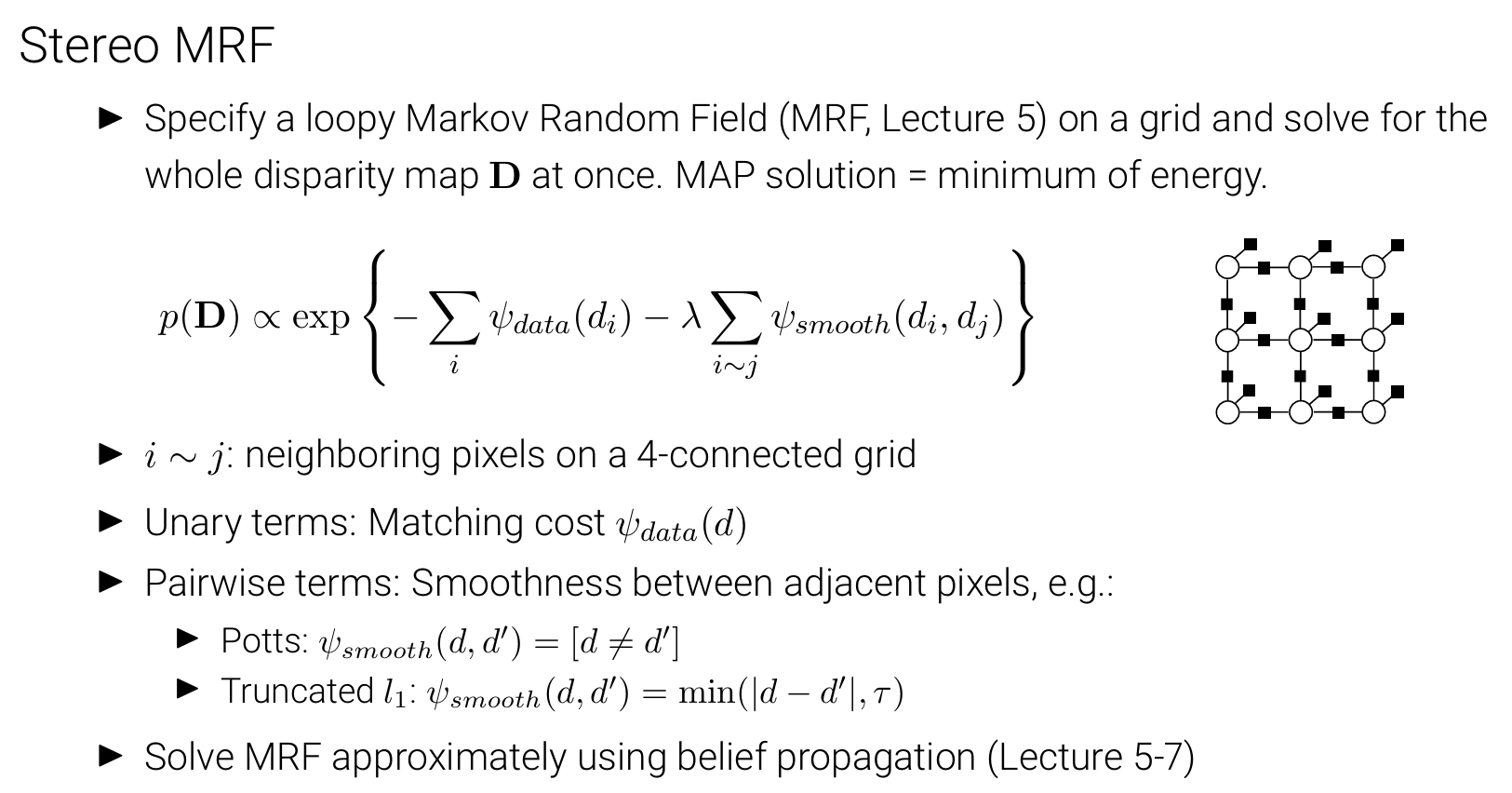
- Compute disparity map for reference image
- Remove outliers using consistency/occlusion test
- Obtain depth from disparity using camera calibration
- Construct 3D model, e.g., via volumetric fusing and meshing (Lecture 8.4)