Primitives and Transformations¶
-
inhomogeneous coordinate
\(\tilde x = (\tilde x, \tilde y, \tilde z, \tilde w)^T\)
-
homogeneous coordinate
\[x = (x, y, z)^T\]
- Transformations
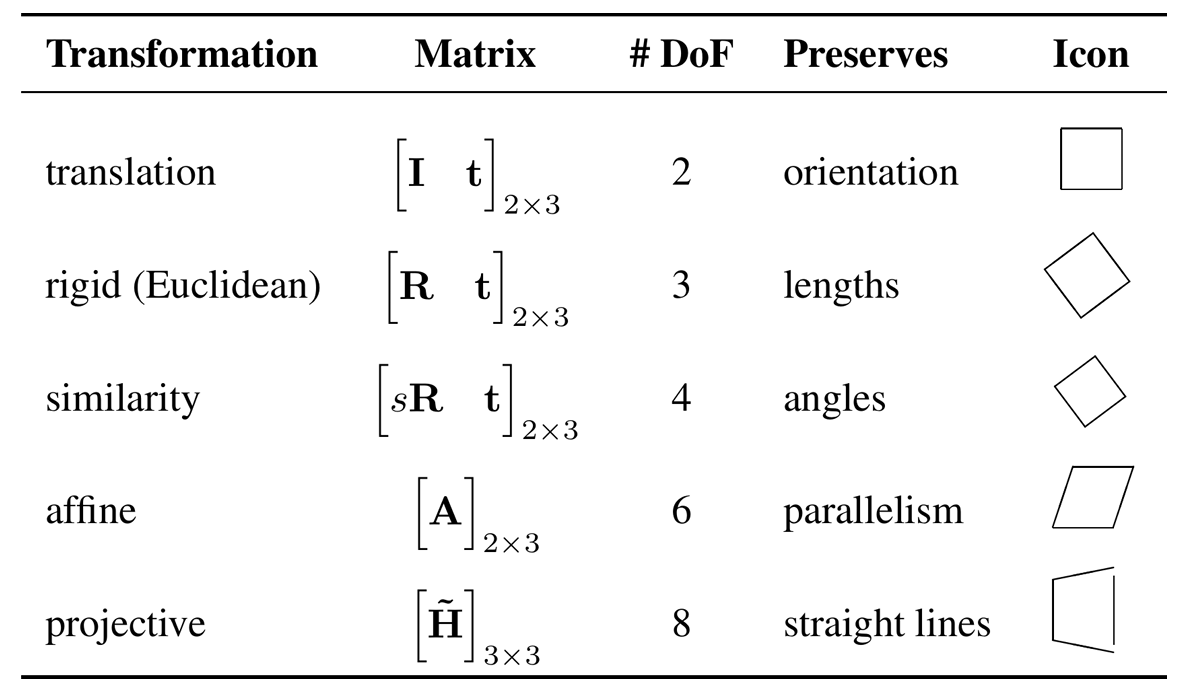
-
Transformation relation of lines and pixels
\(\tilde{x'} = \tilde H \tilde x\)
\(\tilde {l'}\tilde x = \tilde{l'^T}\tilde H \tilde x = (\tilde {H^T} \tilde l' )^T \tilde x = \tilde l ^T \tilde x = 0\)
\(\tilde l' = \tilde{H^{-T}} \tilde l\)
-
Direct Linear Transform for Homography Estimation
``` u, d, v_trans = np.linalg.svd(A)
H is the homography function¶
约 114 个字
H = v_trans[-1].reshape(3,3) ```
Geometric Image Formation¶
-
Orthographic projection
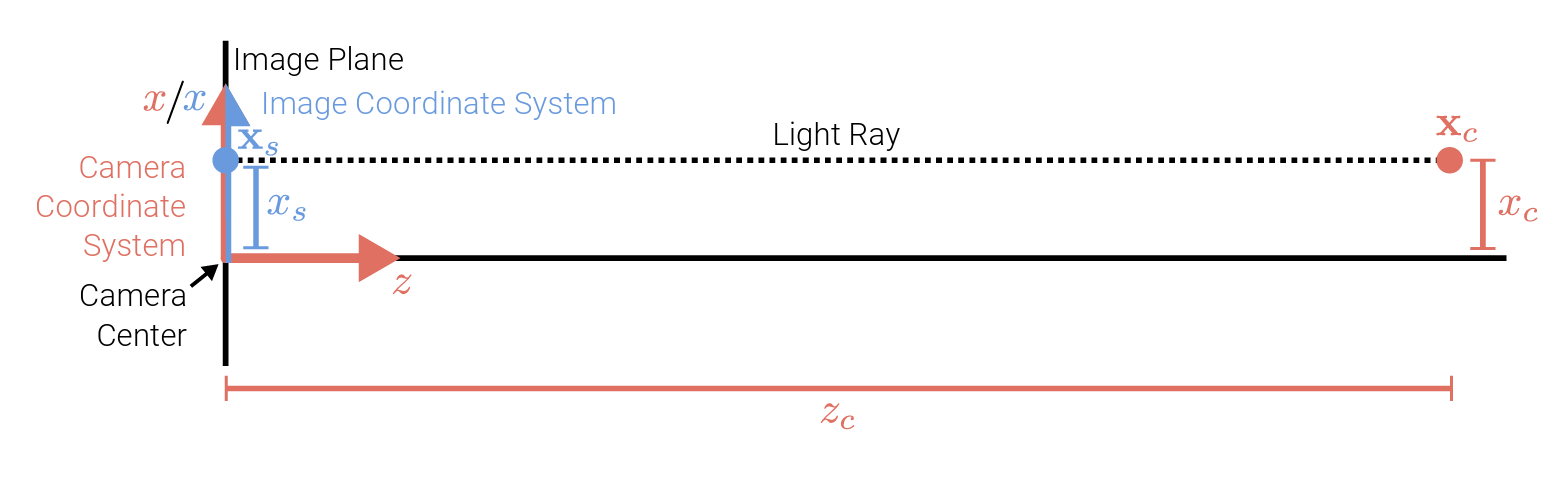
-
Perspective projection


K is the camera intrinsic, intrinsic matrix
s = 0 in practice
-
Chaining transformation


Photometric Image formation¶
-
Rendering equation

-